Journals (J) and Conference Proceedings (C) sorted by the Year
2020
C34. Satheeshbabu, S., & Krishnan, G. (2020). Analysis of Soft Mechanisms Using a Homogenized Strain Induced Model (pp. 179–195). https://doi.org/10.1007/978-3-030-43929-3_17

J24. Patiballa, S. K., & Krishnan, G. (2020). On the design of three-dimensional mechanical metamaterials using load flow visualization. Mechanics Based Design of Structures and Machines, 1–26. https://doi.org/10.1080/15397734.2020.1719506
J23. Uppalapati, N. K., & Krishnan, G. (2020). VaLeNS: Design of a Novel Variable Length Nested Soft Arm. IEEE Robotics and Automation Letters, 5(2), 1135–1142. https://doi.org/10.1109/LRA.2020.2967303
2019

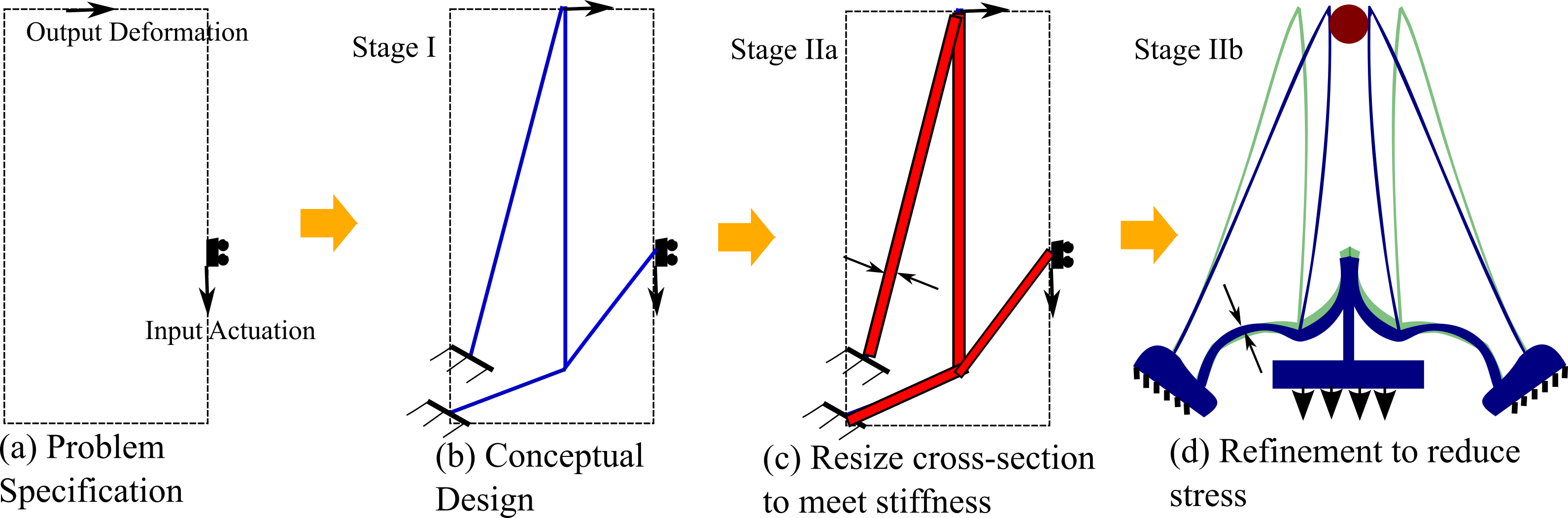
C33. Patiballa, S. K., Satheeshbabu, S., & Krishnan, G. (2019). Load-Flow Based Design of Compliant Mechanisms With Embedded Soft Actuators. In Volume 5A: 43rd Mechanisms and Robotics Conference. American Society of Mechanical Engineers. https://doi.org/10.1115/DETC2019-98514

J22. Chowdhary, G., Gazzola, M., Krishnan, G., Soman, C., & Lovell, S. (2019). Soft Robotics as an Enabling Technology for Agroforestry Practice and Research. Sustainability, 11(23), 6751. https://doi.org/10.3390/su11236751

video link: https://www.youtube.com/watch?v=piavIrHfBfo
J20. Singh, G., & Krishnan, G. (2020). Designing Fiber-Reinforced Soft Actuators for Planar Curvilinear Shape Matching. Soft Robotics, 7(1), 109–121. https://doi.org/10.1089/soro.2018.0169


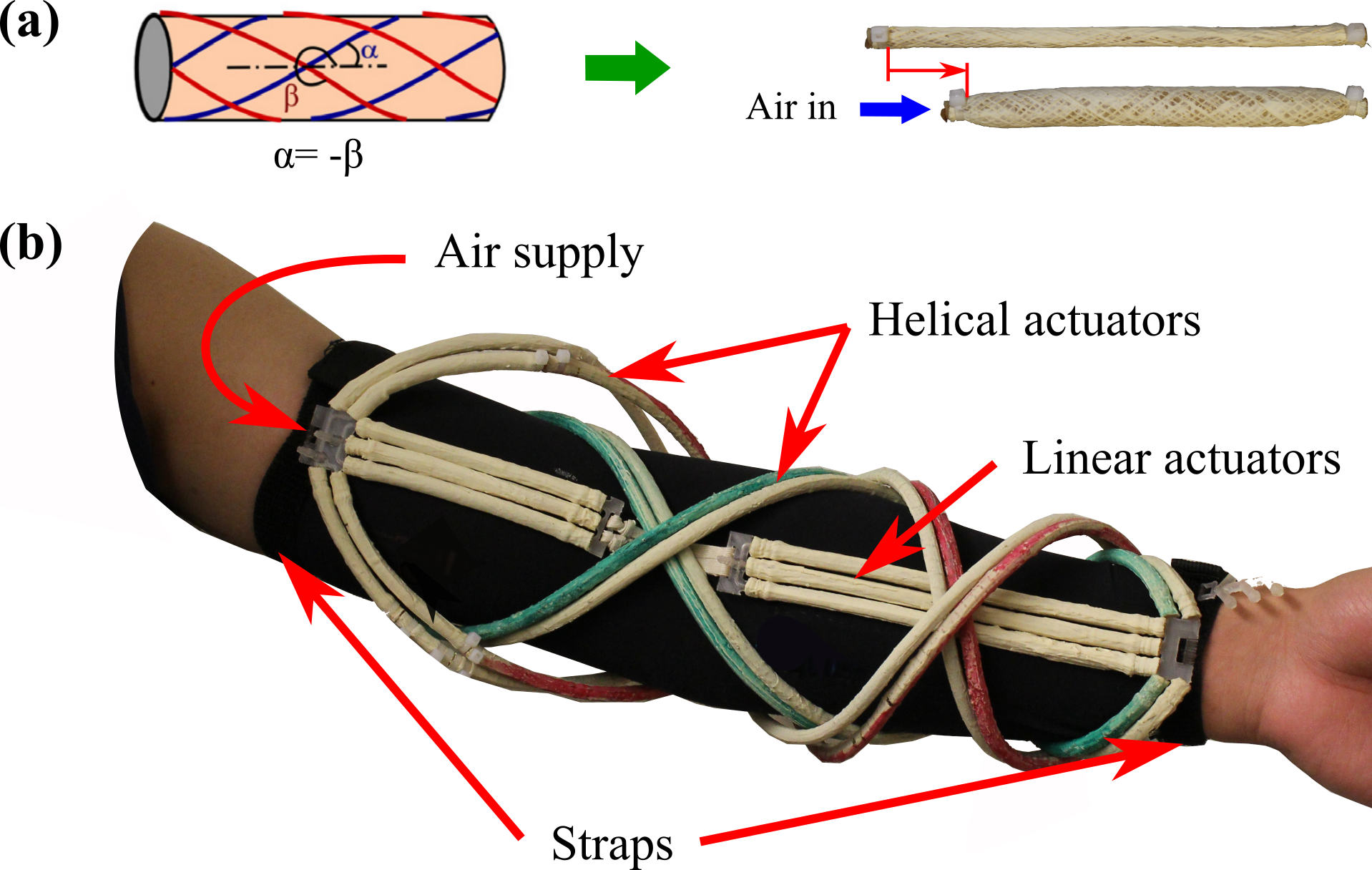
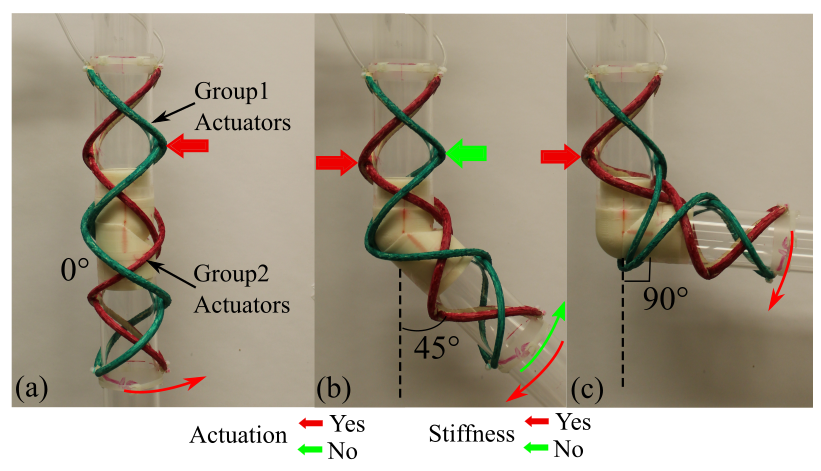
C32. S. Satheeshbabu, N. Thompson, C. Xiao, and G. Krishnan, ” Architectures of Soft Pneumatic Actuators Inspired by Muscle Fiber Arrangements”, accepted for publication and presentation at the 2019 IEEE Conference on Soft Robotics, April 14-18, Seoul, Korea.
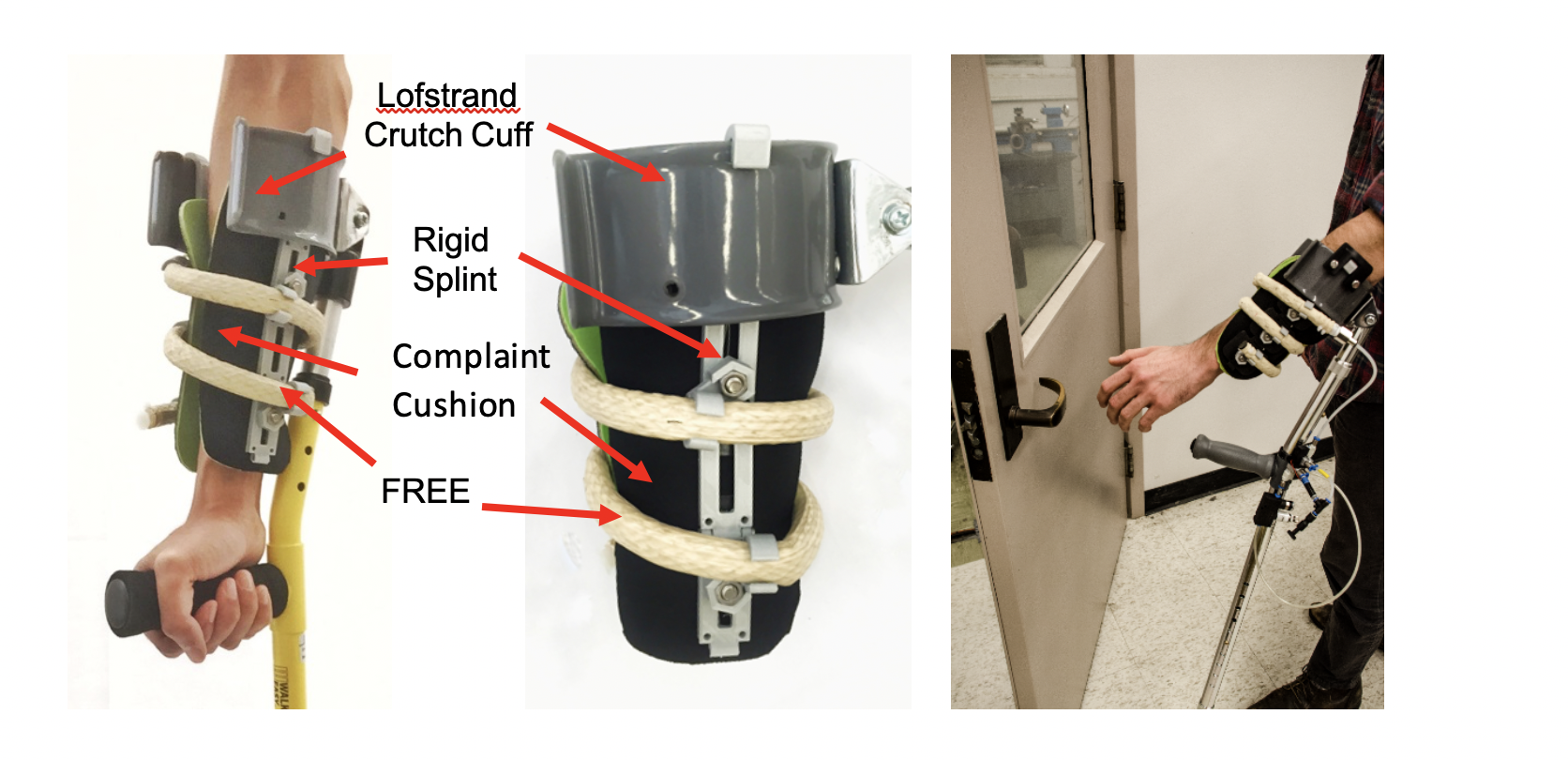
 C33. N. Thompson, A. Sinha, G. Krishnan, “Characterizing Architectures of Soft Pneumatic Actuators for a Cable-Driven Shoulder Exoskeleton“, accepted for publication at the 2019 IEEE Conference of Robotics and Automation (ICRA), Montreal, CA, May 20-24
C33. N. Thompson, A. Sinha, G. Krishnan, “Characterizing Architectures of Soft Pneumatic Actuators for a Cable-Driven Shoulder Exoskeleton“, accepted for publication at the 2019 IEEE Conference of Robotics and Automation (ICRA), Montreal, CA, May 20-24
video link: https://www.youtube.com/watch?v=vuocI4b5_8U&t=20s
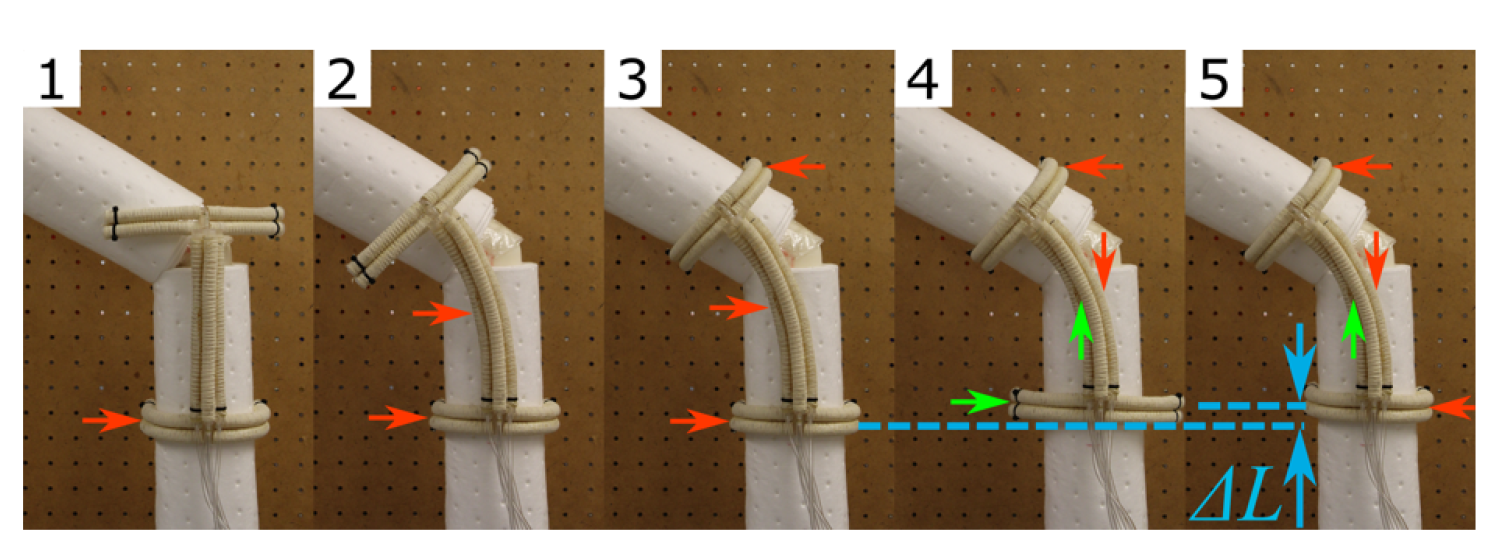
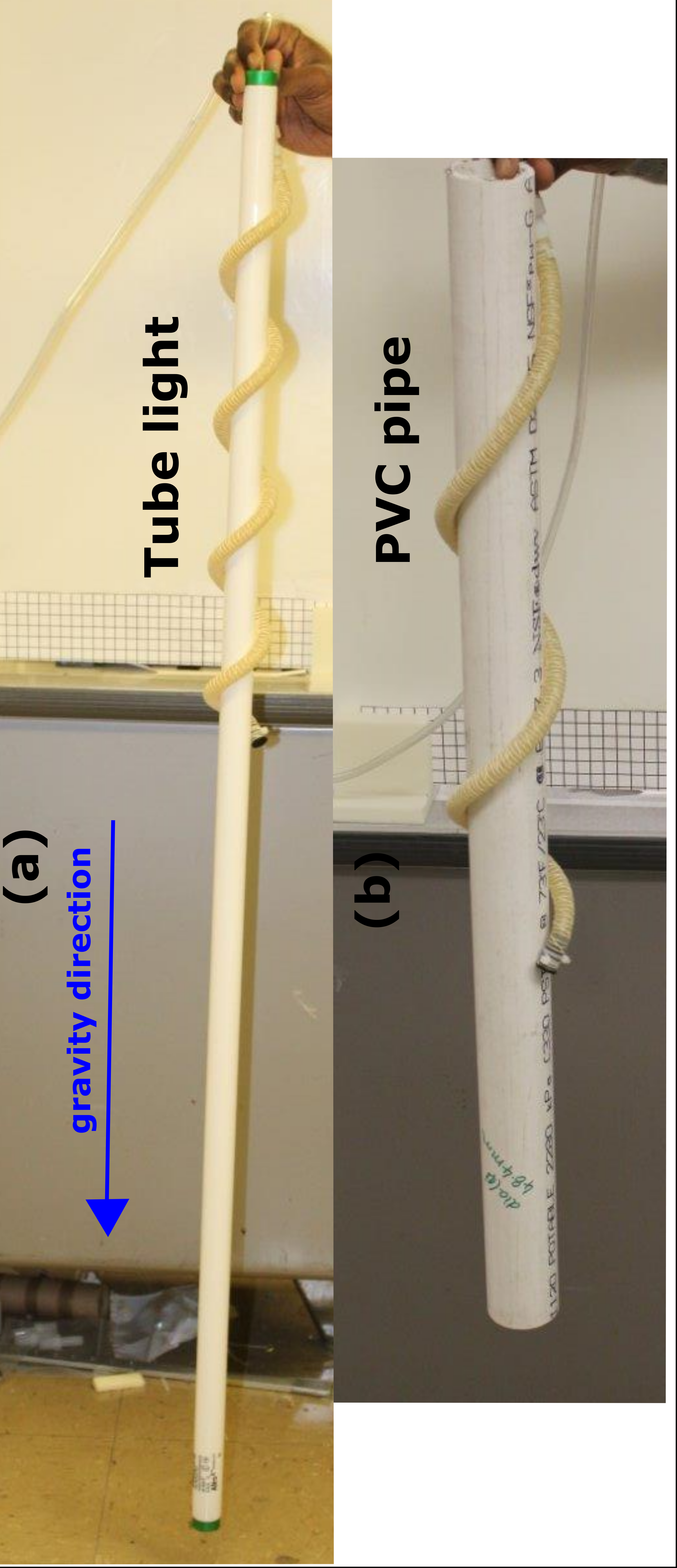
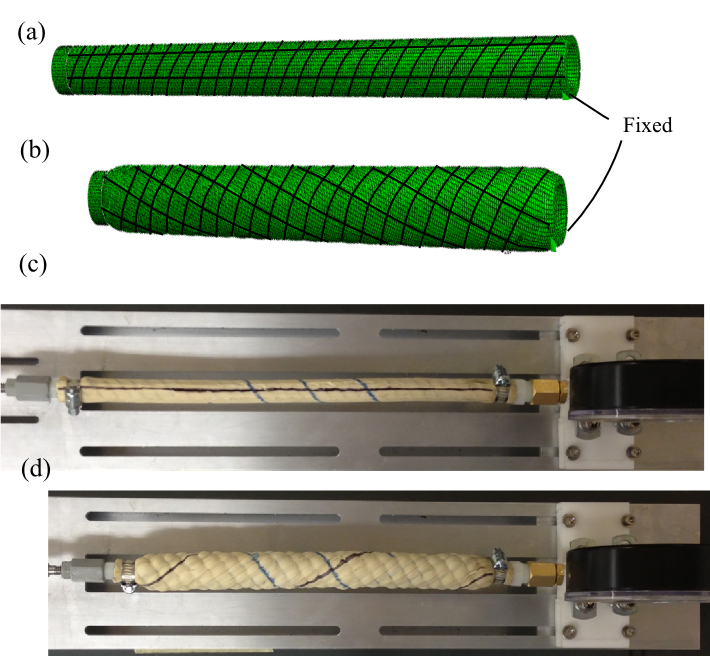
C34. G. Singh, S. Patiballa, X. Zhang, G. Krishnan, “A Pipe-Climbing Soft Robot“, accepted for publication at the 2019 IEEE Conference of Robotics and Automation (ICRA), Montreal, CA, May 20-24

video link: https://www.youtube.com/watch?v=YDWTfJYOf_c&t=3s
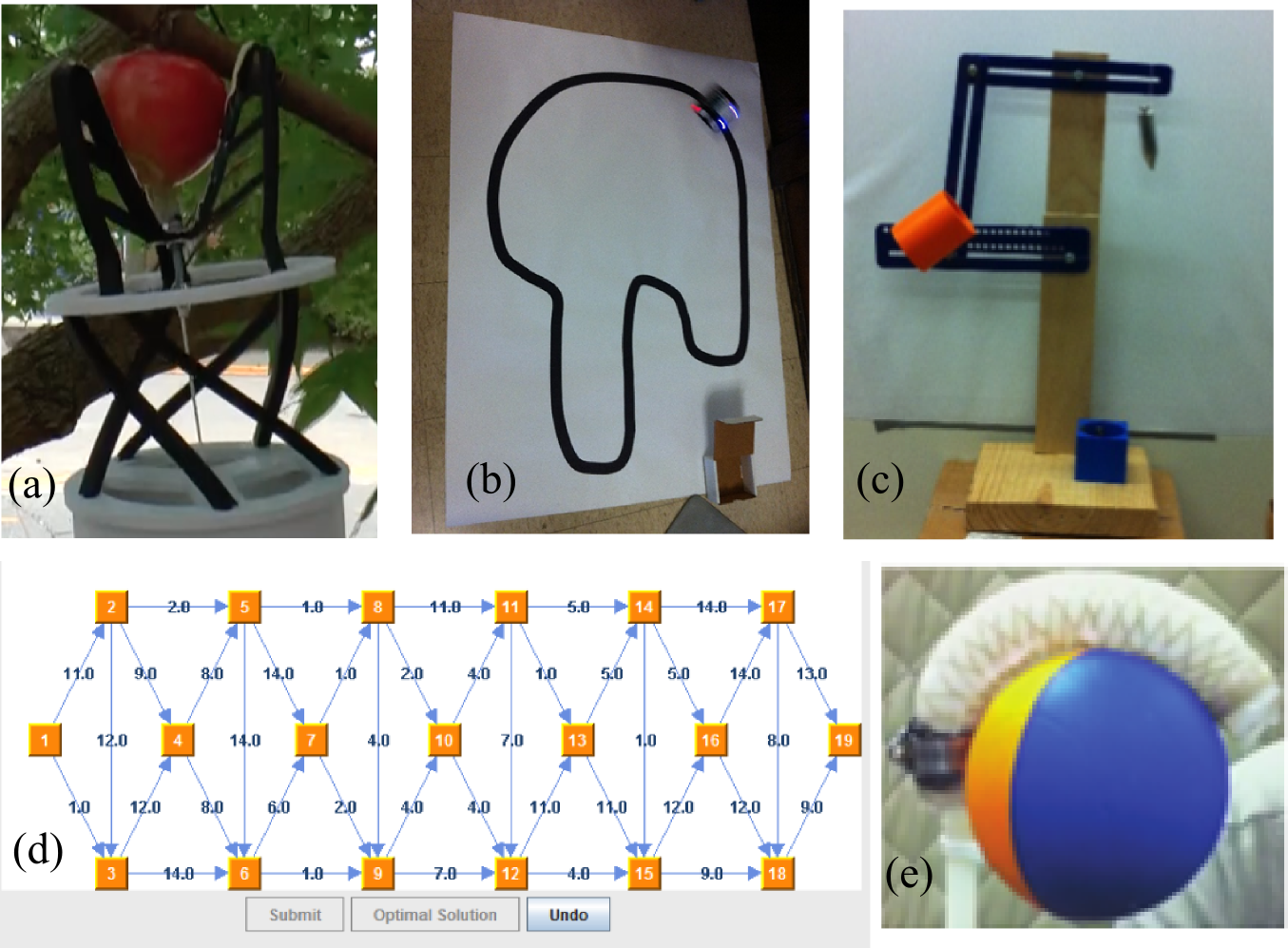
C35. S. Satheeshbabu, N. Uppalapati, G. Chowdhary, and G. Krishnan, “Open Loop Position Control of Soft Continuum Arm Using Deep Reinforcement Learning“, accepted for publication at the 2019 IEEE Conference of Robotics and Automation (ICRA), Montreal, CA, May 20-24
2018
video: https://www.youtube.com/watch?v=a3kgjolyPPQ
 video: https://www.youtube.com/watch?
video: https://www.youtube.com/watch?
C28. Patiballa, S., & Krishnan, G. (2018). Conceptual Design of Spatial Auxetic Microstructures.IUTAM conference on architectured material mechanics. (Abstract only)
2017

This paper was awarded the Freudenstien Young Investigator award at the IDETC 2017, and covered by the college of engineering news.
2016

2015
J9. J. B. Hopkins, J. Rivera, C. Kim, and G. Krishnan, “Synthesis and Analysis of Soft Parallel Robots Comprised of Active Constraints,” J. Mech. Robot., vol. 7, no. 1, p. 011002, Feb. 2015.

2014

C17. Allison, J., Krishnan, G., & Thurston, D. Design of Engineering Systems in Industrial and Enterprise Systems Engineering Department at University of Illinois, inproceedings of the CESUN conference, Stevens Institute of Technology, NJ, June, 2014
please visit: http://systemdesign.illinois.edu
C16. Herber, D. R., McDonald, J. W., Alvarez-Salazar, O. S., Krishnan, G., & Allison, J. T. (2014). Reducing Spacecraft Jitter During Satellite Reorientation Maneuvers via Solar Array Dynamics. In Proceedings of the AIAA/ISSMO 2014 Multidisciplinary Analysis and Optimization Conference, to appear, Altanta, GA, USA, June2014.
2013 and earlier (research from University of Michigan Ann Arbor, and Indian Institute of Science, Bangalore)
J5. Krishnan*, G., Kim, C., Kota, S.. ‘An Intrinsic Geometric framework for the synthesis of single-point mechanisms’, ASME journal of Mechanisms and Robotics, 3, 011001 (2011).
J4. Cappelleri, G. Krishnan*, C. Kim, S. Kota, V. Kumar,‘Towards a design of a decoupled 2-D vision based uN force sensor for microrobotics’, ASME journal of Mechanisms and Robotics, 2, 021010 (2010) (9 pages).
J3. B. Bhaskar, G. Krishnan*, N. Shamsudhin, and G.K. Ananthasuresh, ‘Design, Fabrication, and Tetsing of a Meso-scale Accelerometer Made of Spring Steel’, Journal of the Instrumentation Society of India, Vol. 39, No. 1, March 2009, pp. 46-52.
J2. Krishnan* and G.K. Ananthasuresh. ‘An Objective Evaluation of Displacement-Amplifying Compliant Mechanisms for sensor applications’, ASME Journal of Mechanical Design, October 2008 , Volume 130, Issue 10, 102304 (9 pages).
J1. Krishnan*, C. U. Kshirsagar, N. Bhat and G. K. Ananthasuresh. ‘Micromachined High-resolution Accelerometers’, Journal of the Indian Institute of Science Vol.: 87, No.: 3, September 2007 [Page 333].
Conference Publications (C)
C15. Krishnan*, R. Rank, J. Rokosz, P. Carvey, S. Kota, ‘A Strength Based Approach for the Synthesis of a Compliant Nonlinear Spring for an Orthotic Knee Brace’, to appear in 2013 ASME-IDETC conference proceedings.
C14. Bishop-Moser, G. Krishnan*, S. Kota, ‘Force and Hydraulic Displacement Amplification of Fiber Reinforced Soft Actuators’, to appear in 2013 ASME-IDETC conference proceedings.
C13. Bishop-Moser, G. Krishnan*, C. Kim, S. Kota, ‘Design of Soft Robotic Actuators using Fluid-filled Fiber Reinforced Elastomeric Enclosures in Parallel Combination’, in-proceedings of the IEEE International Conference for Intelligent Robot and Systems (IROS), Vilamoura, Algarve (Portugal), October 7-12, 2012.
C12. Bishop-Moser, G. Krishnan*, C. Kim, S. Kota, ‘Kinematic Synthesis of Fiber Reinforced Soft Actuators in Parallel Combination’, presented at the 2012 ASME-IDETC/CIE, Chicago, IL, August 15-17, 2012.
C11. Krishnan*, J. Bishop-Moser, C. Kim, S. Kota. ‘Evaluating the Mobility Behavior of Fluid Filled Fiber Reinforced Elastomeric Enclosures’, presented at the 2012 ASME-IDETC/CIE, Chicago, IL, August 15-17, 2012.
C10. Krishnan*, C. Kim, S. Kota. ‘A Metric to Evaluate and Synthesize Distributed Compliant Mechanisms’, presented at the 2011 ASME-IDETC/CIE, Washington, DC, August 28-30, 2011.
C9. Krishnan*, C. Kim, S. Kota. ‘Load-Transmitter Constraint Sets Part I: An Effective tool to visualize load flow in Compliant Mechanisms and Structures’, presented at the 2010 ASME-IDETC/CIE, Montreal, QC, August 15-18 2010. (Best Paper Award)
C8. Krishnan*, C. Kim, S. Kota. ‘Load-Transmitter Constraint Sets Part II: A Building Block Based Methodology for Conceptual Synthesis of Compliant Mechanisms’, presented at the 2010 ASME-IDETC/CIE, Montreal, QC, August 15-18 2010.
C7. Krishnan*, C. Kim, S. Kota. ‘Synthesis of single port compliant mechanisms using serial concatenation of building blocks’, presented at the ASME-IDETC/CIE, San Diego, CA, September 1-3 2009.
C6.Cappelleri, G. Krishnan*, C. Kim, S. Kota, V. Kumar,‘Towards a design of a decoupled 2-D vision based uN force sensor for microrobotics’, presented at the ASME-IDETC/CIE, San Diego, CA, September 1-3 2009.
C5. Krishnan*, C. Kim, S. Kota. ‘Building block Methods to Synthesize Biologically Inspired Mechanisms’, poster presented at the NSF CMMI 2009 grantees conference held in Hawaii, June 21-24.
C4. Krishnan*, C. Kim, S. Kota. ‘A Lumped model based concatenation of building blocks for Conceptual Compliant Mechanism design’ presented at the ASME-IDETC-CIE, Brooklyn, NY, August 2008.
C3. Krishnan* and G. K. Ananthasuresh. ‘An Objective Evaluation of Displacement-Amplifying Compliant Mechanisms for sensor applications’ presented at the ASME-IDETC-CIE, Philadelphia PA, September 2006.
C2. Krishnan*. ‘A displacement Amplification Compliant Mechanism as a Mechanical Force Sensor’ presented at the ASME-IDETC-CIE, Philadelphia, PA, September 2006. (this entry won the 2nd prize)
C1. G. Bharadwaj, G. Krishnan*, K Badari Narayana, ‘Experimental Evaluation of Actuation of a Piezo-Actuated Micro leg’, ISSS conference on smart materials and structures, held at Bangalore, July 2005. (Best paper Award)
Thesis and Reports
- Krishnan, 2010 December. ‘An Intrinsic and Geometric Framework for Synthesis and Analysis of Distributed Compliant Mechanisms’, thesis submitted towards the partial fulfillment of PhD , Univeristy of Michigan, Ann Arbor.
- Krishnan, 2006 December. ‘Displacement Amplifying Compliant Mechanism for Sensor Application’, thesis submitted towards the partial fulfillment of MS degree, Indian Institute of Science, Bangalore, India.